Deep dive into GROOT N1.5: A Foundation Model for Generalist Humanoid Robots

Today, we dive into GROOT N1.5, the latest iteration of NVIDIA’s open foundation model for generalist humanoid robots. NVIDIA has shared limited details about GROOT N1.5. That said, the model builds closely on the foundation of its predecessor, GROOT N1, retaining many similarities in its core design and capabilities. So we’ll explore the well-documented GROOT N1 to shed light on its advancements. At the end of the article, we'll explore the key differences between the two models.
GROOT N1 features a Vision-Language-Action (VLA) model with a dual-system architecture and a novel training strategy, enabling robots to reason about their environments, generate fluid actions, and adapt to new tasks efficiently. Trained on a diverse mix of real-robot trajectories, human videos, and synthetic data, GROOT N1 sets a strong foundation for understanding its successor. Let’s break it down step by step, exploring its design, training, and performance.
1. Foundation Models in Robotics: A Recap
Foundation models are large-scale neural networks trained on vast, diverse datasets, designed to generalize across tasks and adapt with minimal fine-tuning. In robotics, this translates to a model capable of controlling various robot embodiments—think single-arm manipulators to dexterous humanoids—while performing a wide range of tasks. GROOT N1 embodies this vision, leveraging a VLA framework to integrate visual perception, language understanding, and action generation into a unified system.
2. GROOT N1: A Vision-Language-Action Model
GROOT N1 is engineered to process visual inputs (e.g., camera images), language instructions (e.g., "pick up the apple"), and the robot’s proprioceptive state, outputting a sequence of motor actions. Its standout feature is a dual-system architecture, drawing inspiration from human cognitive processing as outlined in Daniel Kahneman’s Thinking, Fast and Slow.
Dual-System Design
- System 2: Vision-Language Module
This is the reasoning backbone, a pre-trained Vision-Language Model (VLM) named Eagle-2, fine-tuned from SmolLM2 and SigLIP-2. Running at 10 Hz on an NVIDIA L40 GPU, it processes 224x224 resolution images and text instructions, producing tokens that encapsulate the environment and task goals. Think of it as the deliberative mind, interpreting what needs to be done. - System 1: Diffusion Transformer
The action generator, a Diffusion Transformer (DiT), operates at 120 Hz, taking the VLM’s output tokens and the robot’s state to produce smooth, real-time motor actions via flow-matching. This is the fast, intuitive system, handling the how of execution.
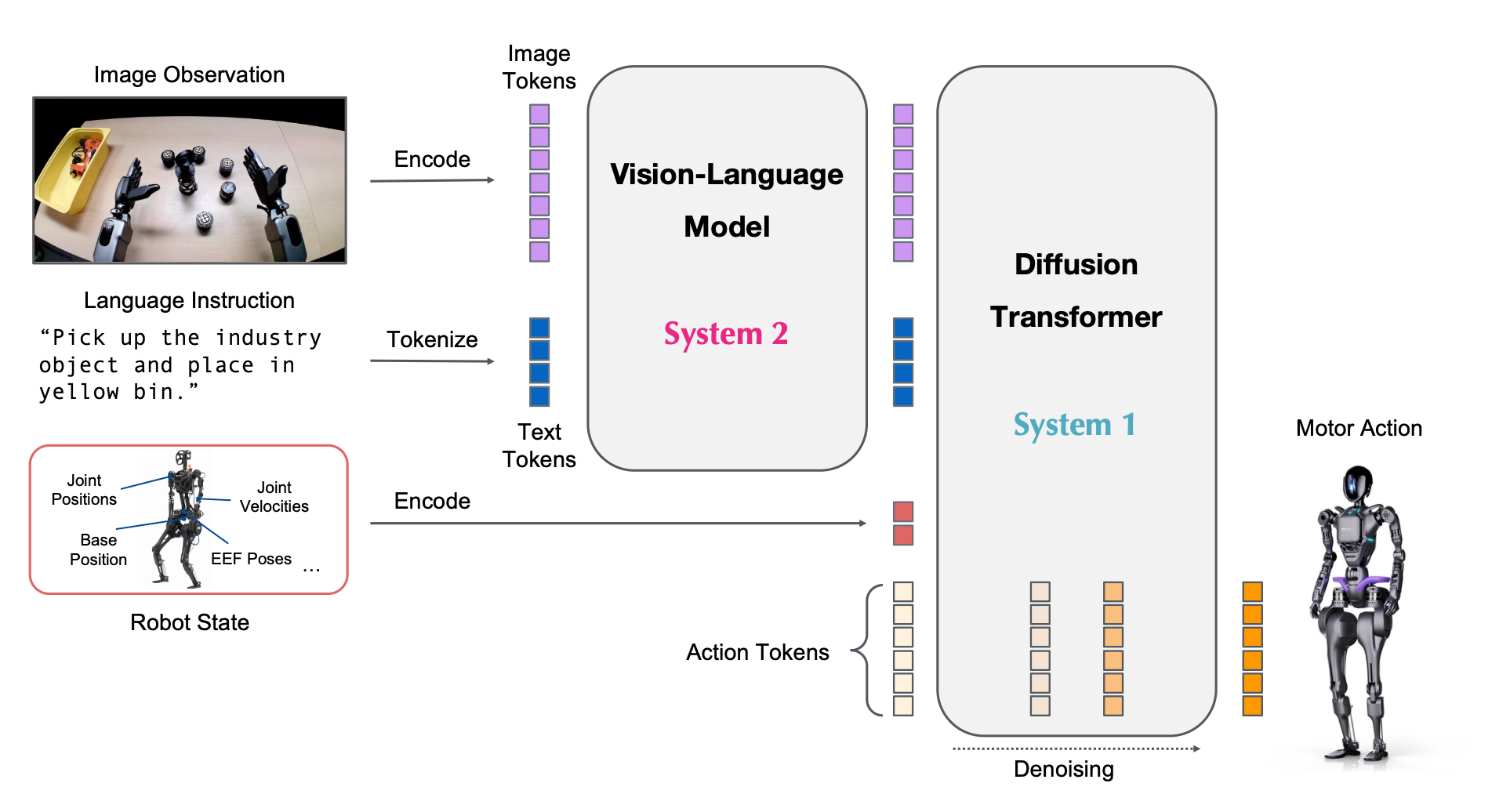
Both modules are Transformer-based, tightly coupled, and trained end-to-end. This synergy allows high-level reasoning to inform low-level action generation seamlessly, mimicking human-like coordination between thought and movement.
3. Model Architecture in Detail
System 2: Vision-Language Module
The Eagle-2 VLM encodes visual and language inputs into a shared representation. Images are processed into 64 token embeddings per frame, while text instructions are tokenized in a chat-like format. These embeddings, extracted from the 12th layer of the VLM, feed into System 1, balancing inference speed and task performance.
System 1: Diffusion Transformer
The DiT generates actions by denoising noised action samples, conditioned on VLM tokens and robot state. It uses:
- Embodiment-specific MLPs: To project variable state and action spaces into a shared embedding dimension, enabling cross-embodiment compatibility.
- Flow-matching: An iterative denoising process where action chunks (16 timesteps) are predicted, ensuring smooth, closed-loop control.
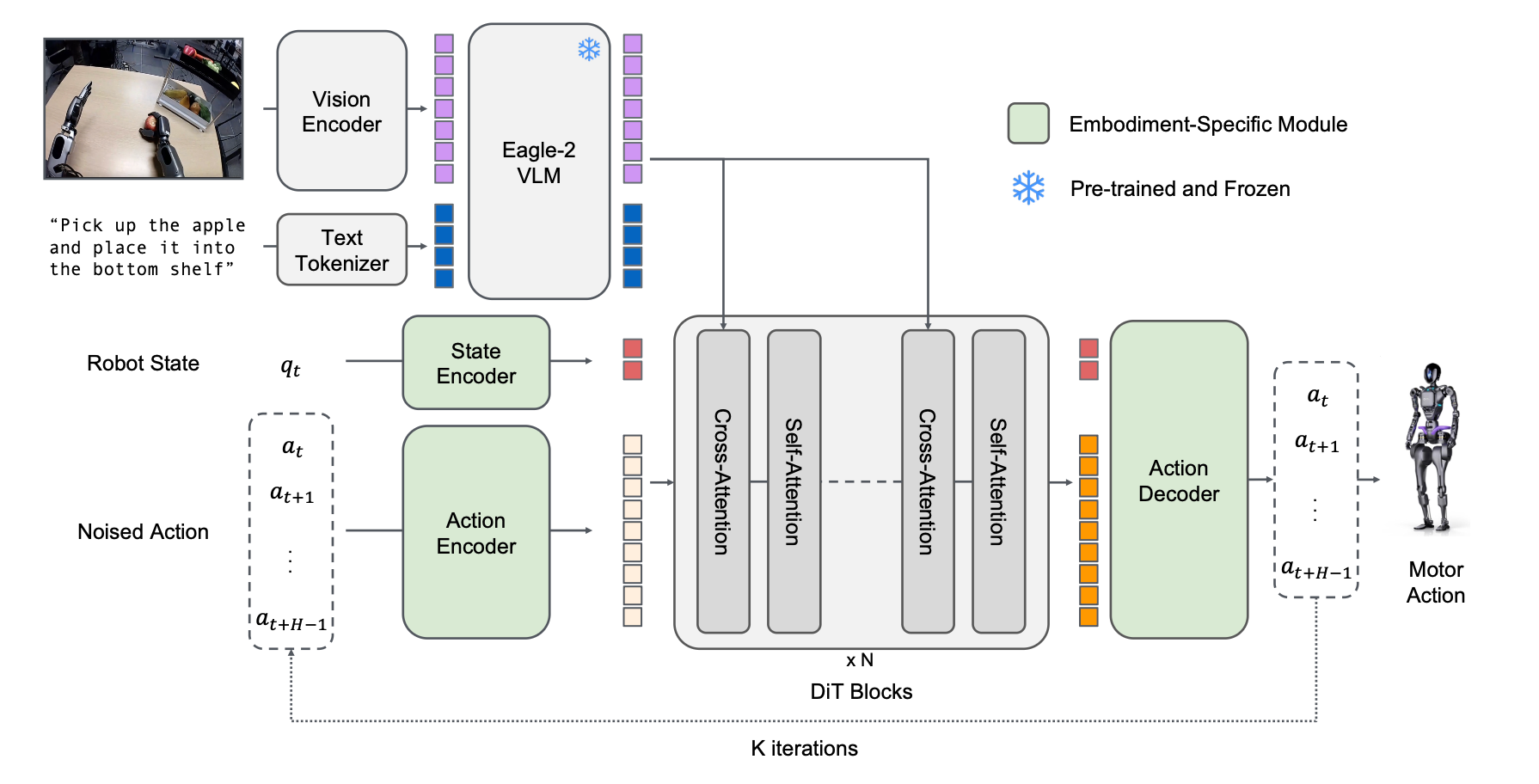
This design supports diverse embodiments—from single-arm robots to bimanual humanoids—making GROOT N1 a true generalist.
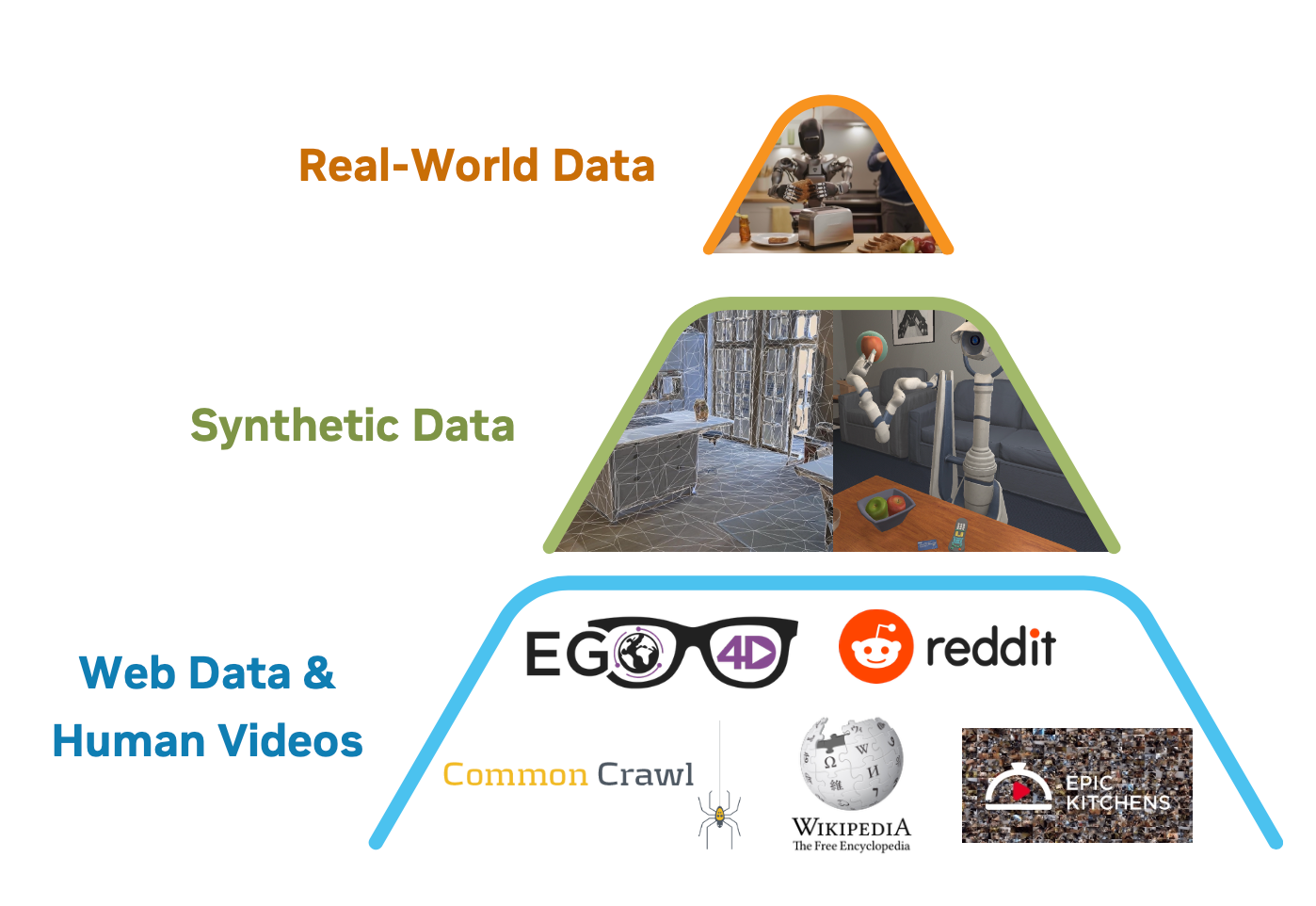
4. Training Data: The Data Pyramid
Training a robotics foundation model demands massive, varied data, but real-robot trajectories are scarce. GROOT N1 addresses this with a data pyramid:
- Base: Web data and human videos (e.g., Ego4D, EPIC-KITCHENS), providing broad behavioral priors.
- Middle: Synthetic data from simulations (e.g., DexMimicGen) and neural-generated videos, bridging general knowledge to embodied tasks.
- Top: Real-robot trajectories (e.g., GR-1 teleoperation data), grounding the model in physical execution.
Handling Action-Less Data
Human videos lack explicit actions, so the team employs:
- Latent-action Codebook: A VQ-VAE extracts latent actions from video frame pairs, trained across all data for a unified action space.
- Inverse Dynamics Model (IDM): Predicts pseudo-actions from consecutive frames, augmenting action-less data.
This unification creates a consistent dataset of states, observations, instructions, and actions, enabling end-to-end training.
5. Training Strategy
Pre-Training
GROOT N1 is pre-trained on the full data pyramid, sampling from real, synthetic, and human datasets. The flow-matching loss optimizes action generation, with latent or pseudo-actions used for non-robot data. This phase builds general capabilities across embodiments.
Post-Training
Fine-tuning adapts the model to specific tasks or robots, leveraging its pre-trained knowledge for data-efficient learning. Neural trajectories further augment this phase, scaling task-specific data with generated videos.
6. Evaluation and Results
Simulation Benchmarks
GROOT N1 was tested on three benchmarks:
- RoboCasa Kitchen: 24 tasks with a Franka Panda arm, outperforming baselines like Diffusion Policy in success rates (e.g., 49.6% vs. 43.2% with 300 demos).
- DexMimicGen Suite: 9 bimanual tasks across three embodiments, achieving 74.2% average success vs. 68.4% for Diffusion Policy.
GR-1 Tabletop: 24 humanoid tasks, showing competitive performance (49.3% average).
Real-World Performance
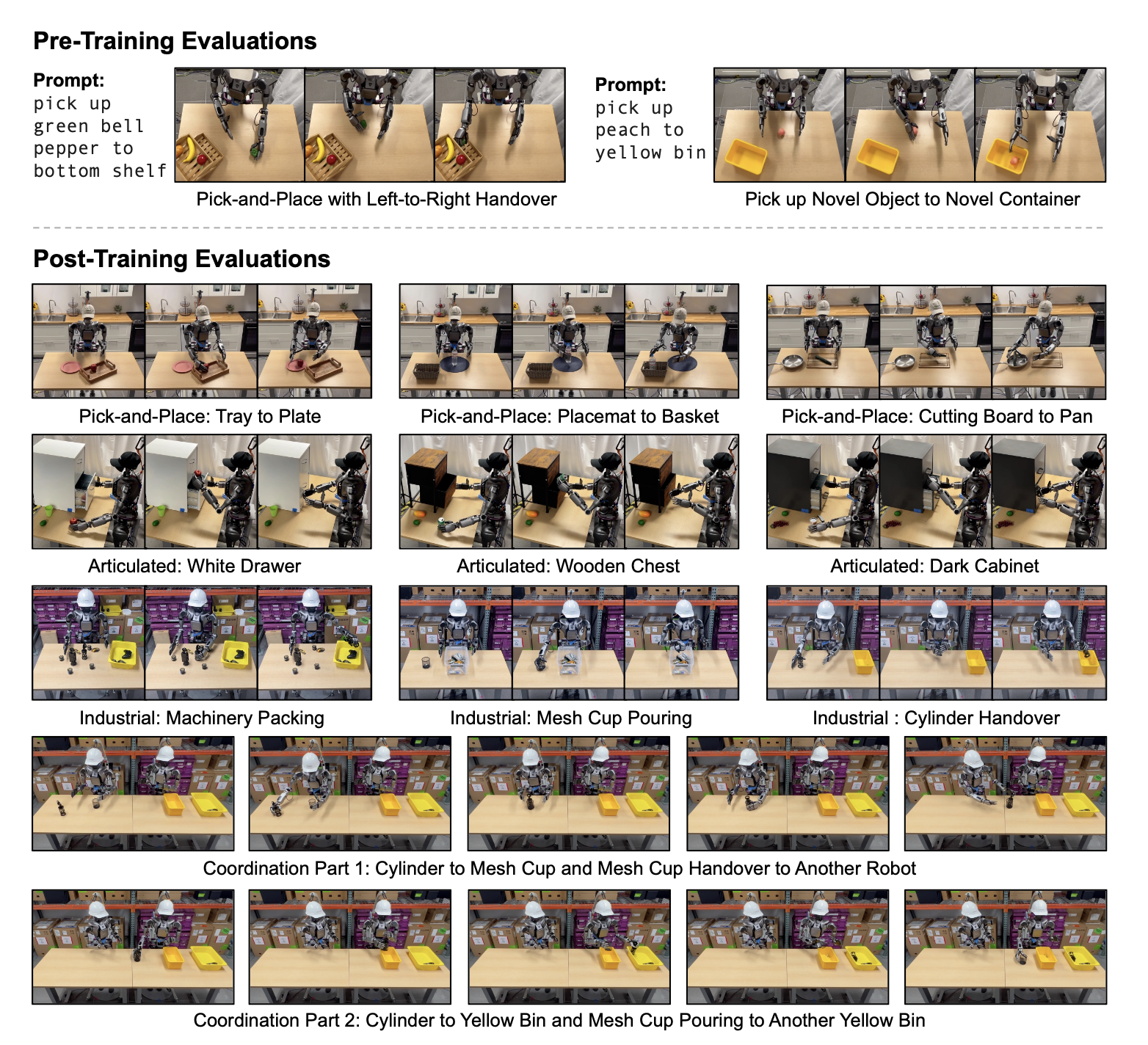
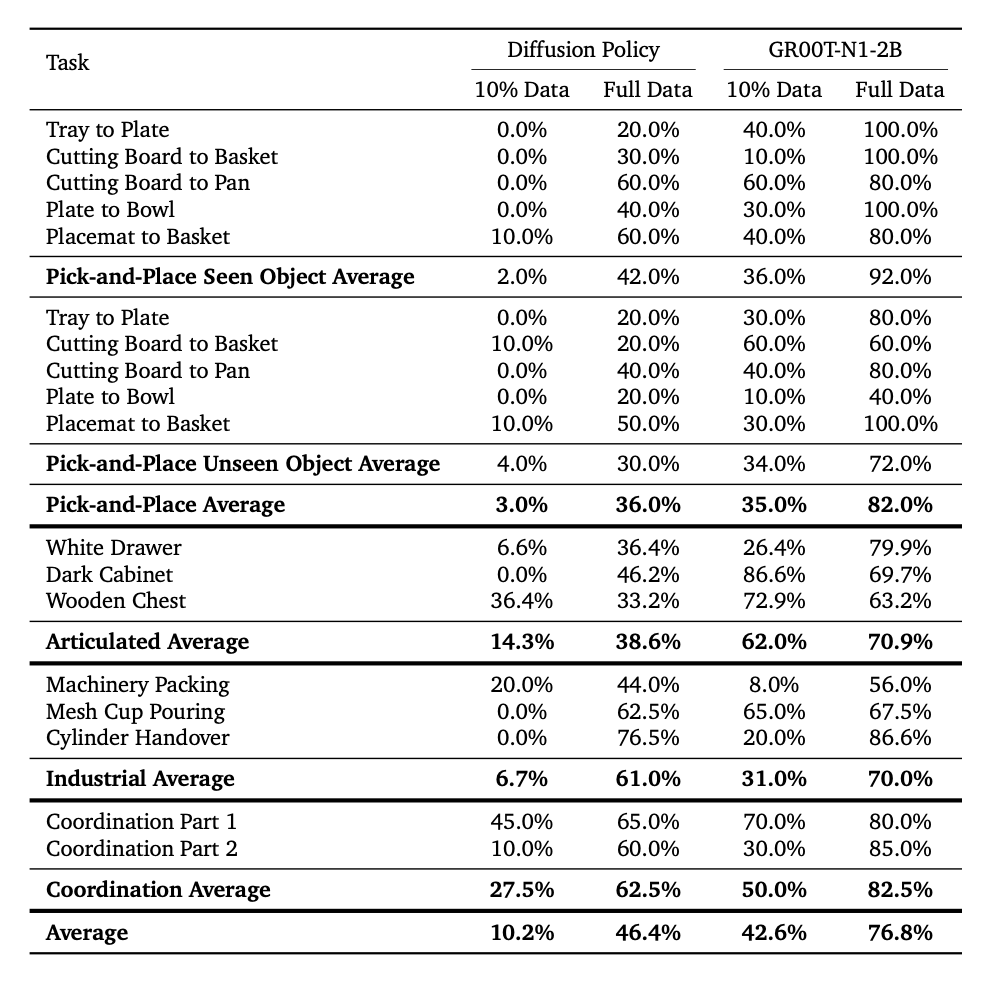
Deployed on the Fourier GR-1, GROOT N1 excels in tasks like pick-and-place (82% average success with full data) and articulated object manipulation (70.9%), demonstrating high data efficiency even with 10% data (42.6% average).
7. Test GROOT N1 on your own robot
GR00T N1 is a beast of a model, and running it locally is no small feat. Let’s do some napkin math to understand why, and then explore what are alternatives.
Running GROOT N1 Locally: A Heavy Lift
GR00T N1’s 2.2 billion parameters (1.34B in the VLM alone) demand serious hardware. The paper reports inference times of 63.9 ms for a chunk of 16 actions on an NVIDIA L40 GPU using bfloat16 precision. Let’s break it down:
- Memory Footprint: A 2.2B parameter model in bfloat16 (2 bytes per parameter) requires roughly 4.4 GB for weights alone. Add activations, intermediate buffers, and vision processing (224x224 images), and you’re looking at ~10-12 GB of GPU memory for inference. For fine-tuning, double that to account for gradients and optimizer states—call it ~20-24 GB.
- Compute Power: The L40 GPU, with 48 GB VRAM and ~90 TFLOPS (FP16), handles the dual-system architecture (VLM at 10 Hz, DiT at 120 Hz). A consumer-grade RTX 3090 (24 GB, ~35 TFLOPS) might squeak by for inference with aggressive optimizations, but fine-tuning or real-time control on a humanoid like the GR-1 would be sluggish or infeasible. Pre-training? Forget it—50,000 H100 GPU hours (~1024 GPUs for days) is enterprise-level compute.
For hobbyists or small labs, this is a tall order. Even if you have the hardware, setting up the environment, managing dependencies, and optimizing for real-time control is a slog.
What's New in GR00T N1.5
GR00T N1.5 represents a significant upgrade from its predecessor, GR00T N1, bringing substantial improvements in both model design and data quality, resulting in notably enhanced performance.
Model and Data Enhancements
- Frozen Vision-Language Model (VLM): The vision-language model remains fixed throughout pretraining and finetuning. This preserves the model's original language comprehension capabilities, boosting its ability to generalize effectively.
- Improved VLM Grounding: Updated to Eagle 2.5, which features better grounding and physical interaction understanding. This update achieves a 40.4 Intersection-over-Union (IoU) on GR-1 grounding benchmarks, surpassing the previous Qwen2.5VL model's 35.5 IoU.
- Streamlined Adapter: A simplified connection between the vision encoder and the language model is introduced through a streamlined MLP (multi-layer perceptron) with added layer normalization, enhancing efficiency.
- FLARE Objective: Integrated the Future Latent Representation Alignment (FLARE) alongside the existing flow matching loss. FLARE enables the model to effectively learn from videos recorded from a human perspective (ego videos).
- DreamGen Synthetic Data: Included synthetic neural trajectories from DreamGen. This addition significantly enhances the model’s ability to generalize to new behaviors and tasks beyond traditional teleoperation data.
Performance Improvements
- Enhanced Language Command Following: Significantly improved performance on language command tasks, increasing accuracy from 46.6% to 93.3% on GR-1 manipulation benchmarks.
- Improved Data Efficiency: Performs notably better in low-data settings, making it highly suitable for zero-shot and few-shot applications.
- Better Generalization to Novel Objects: Demonstrates improved performance when encountering new and unseen objects, enhancing real-world applicability.
- Expanded Robot Compatibility: Introduced new specialized heads—EmbodimentTag.OXE_DROID for single-arm robots using end-effector (EEF) control, and EmbodimentTag.AGIBOT_GENIE1 for humanoid robots with grippers. This expands compatibility beyond traditional joint-space robot control.
Overall, GR00T N1.5 is particularly effective in scenarios requiring robust language understanding, rapid few-shot adaptation, and strong generalization capabilities. For further details and experimental results, readers can refer to the comprehensive GR00T N1.5 technical blog.
Using phospho: Fine-Tuning and Inference Made Simple
Instead of wrestling with local compute, phosphobot offers a streamlined solution using its cloud GPU infrastructure. Built for ML engineers, phosphobot integrates with the SO-100 robot arm (and others) and supports GR00T N1 out of the box. Here’s why it’s the best way to try GR00T N1:
- One-Click Fine-Tuning: From the phosphobot dashboard, you can fine-tune GR00T-N1-2B on your own dataset (e.g., recorded via teleoperation with the Meta Quest app). Just upload your LeRobot v2.1 dataset to Hugging Face, enter its ID (e.g., phospho-app/my-dataset), and hit “Train AI Model.” Phosphobot’s cloud handles the heavy lifting—think A100 or H100 GPUs—taking ~3 hours for ~50 episodes. No need to wrangle local GPUs or debug CUDA errors.
- Seamless Inference: Once trained, your model (e.g., phospho-app/my-dataset-random-id) is ready for inference. In the dashboard’s “AI Training and Control” section, enter your model ID, specify a task instruction (e.g., “pick up the green lego brick”), and click “Start AI Control.” Phosphobot spins up a cloud GPU instance, streams camera feeds, and sends actions to your robot in real time. You can pause, resume, or tweak instructions on the fly.
- LeRobot Compatibility: Phosphobot uses the LeRobot dataset format, ensuring your data works with GR00T N1 and other models like ACT or π0. Record datasets via teleoperation, repair/merge/split them in the dashboard, and visualize them with Hugging Face’s LeRobot Dataset Visualizer.
- Hardware Simplicity: All you need is a computer to run the phosphobot server (phosphobot run) and an SO-100 arm with cameras. The cloud handles compute, so your laptop or Raspberry Pi is enough to orchestrate control.
To get started, install phosphobot on Mac, Linux or Windows with a single command:
# macos
curl -fsSL https://raw.githubusercontent.com/phospho-app/phosphobot/main/install.sh | bash
# linux
curl -fsSL https://raw.githubusercontent.com/phospho-app/phosphobot/main/install.sh | sudo bash
# windows
powershell -ExecutionPolicy ByPass -Command "irm https://raw.githubusercontent.com/phospho-app/phosphobot/main/install.ps1 | iex"
Learn more about phospho and how to get started in the documentation.
8. Conclusion
GR00T N1.5 build directly on the strong foundation established by GR00T N1, while introducing notable enhancements, particularly in language comprehension, data efficiency, and adaptability to novel tasks. The integration of advanced methods such as the FLARE objective and DreamGen synthetic data generation offers meaningful, though incremental, improvements in leveraging diverse training sources. Additionally, expanded robot compatibility through specialized embodiment heads slightly broadens its practical applicability. The open release of the GR00T-N1-2B checkpoint, datasets, and benchmarks invites continued exploration and iterative improvement, accelerating the broader pursuit of robust, intelligent, and versatile robotics.
Learn more in the original paper here.